Tweerichtings600kg-AGV Autonome Geleide Voertuigen Zelf Geleide Voertuigen
-
Hoog licht
600kg AGV Autonome Geleide Voertuigen
,AGV Autonome Geleide Voertuigen
,600kg zelf geleide voertuigen
-
KerncomponentenPLC, Motor
-
ToepassingMateriële behandeling
-
afmetingL1875*W580*H350
-
Nuttige lading600kg
-
BewegingTweerichtings
-
MateriaalRoestvrij staal
-
Gewicht (kg)250
-
CertificatenCe
-
Plaats van herkomstGuangzhou, China
-
MerknaamZHLUN
-
CertificeringISO9001
-
ModelnummerZl-RT-K1
-
Min. bestelaantalOvereen te komen
-
PrijsNegotiable
-
Verpakking DetailsVerpakking: Houten Doos
-
Levertijd25 dagen
-
BetalingsconditiesL/C, T/T, Western Union
-
Levering vermogen1000 stukken per maand
Tweerichtings600kg-AGV Autonome Geleide Voertuigen Zelf Geleide Voertuigen
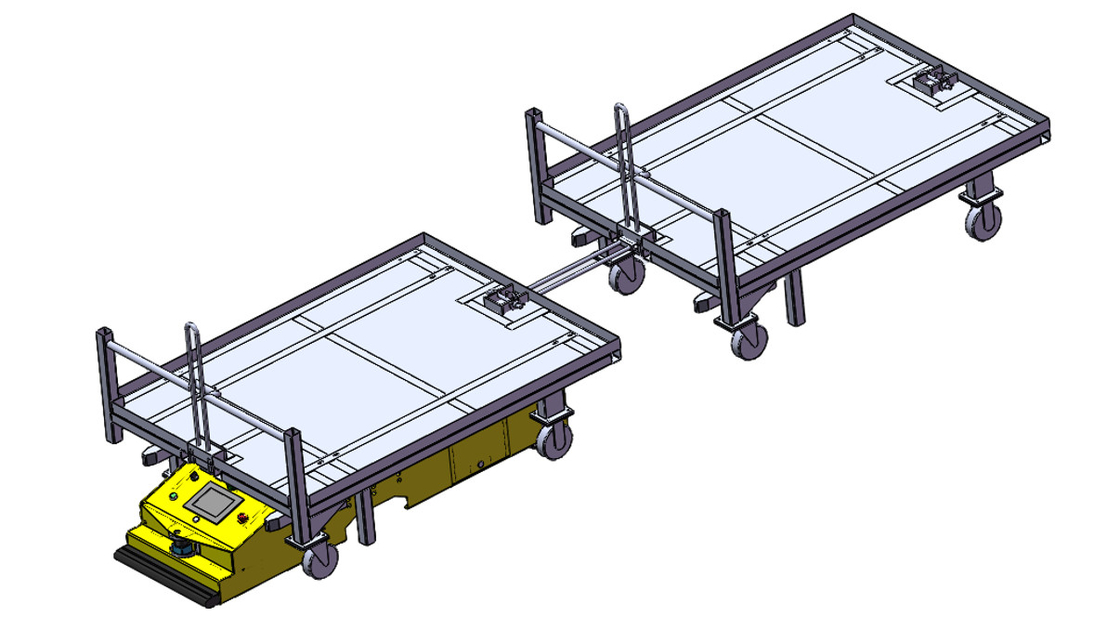
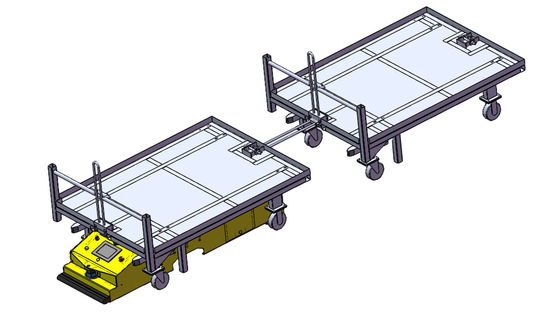
AGV Logitech het Drijven Agv van het het Voertuigpakhuis van de Wiel Automatische Gids voor Industrie
AGV is een standaardmaat, hoge snelheid, elektrische trein met meerdere eenheden die door Alstom wordt ontworpen en wordt gebouwd. Alstom biedt AGV in configuraties van zeven tot veertien vervoer aan, die 245 tot 446 personen zetten. De treinen worden geconstrueerd van eenheden bestaand uit drie auto's en enig-auto bestuurder-aanhangwagens. De maximum commerciële snelheid is 360 km/h.
![]()
De toepassing van AGV karretjes in de productie van fabrieken wordt meer en meer gemeenschappelijk. Het kan onbemande behandeling realiseren, en de automatisering van automatische online, automatische off-line, en centrale overdracht van producten realiseren aan materialen, die een goede oplossing is om de efficiency van productielogistiek te verbeteren. In het productieproces om te vervaardigen, wordt het dwars-vloervervoer vaak uitgevoerd, dat ook uitvoerbaar voor AGV is. Momenteel, kunnen de krachtigere AGV fabrikanten automatisch vervoer over vloeren bereiken. De moeilijkheid van AGV dwars-vloervervoer is de technologie van AGV karretjes op te lossen berijdt automatisch liften.
Hoe automatisch neemt de AGV auto de lift?
Het proces van de AGV auto die de lift neemt automatisch is verdeeld in de volgende stappen:
![]()
1. De AGV auto komt bij de de liftdeur en einden aan, en het AGV controlesysteem verzendt een het verzoekinstructie van de liftingang naar de lift door het netwerk.
2. Nadat de lift het signaal van het AGV controlesysteem ontvangt, opent het de deur en handhaaft de normaal open staat. En koppel het signaal terug dat de lift voor het AGV controlesysteem is geopend.
3. Na het ontvangen van het signaal dat de lift is geopend, gaat de AGV kwesties van het controlesysteem een drijfinstructie aan het AGV karretje, en het AGV karretje de lift in.
4. Nadat de AGV auto de lift ingaat, verzendt het een vloerinstructie naar de lift. De lift ontvangt de instructie, sluit de lift, en komt bij de aangewezen vloer aan.
5. Nadat de lift de aangewezen vloer bereikt, opent de liftdeur en houdt de normaal open staat. En verzend de liftdeur normaal open signaal naar het AGV controlesysteem.
6. Nadat het AGV controlesysteem de aankomst bij de aangewezen vloer ontvangt, verzendt het een drijfinstructie naar het AGV karretje, en het AGV karretje gebruikt de lift.
7. Na de AGV karretjeuitgangen koppelt de lift, het AGV controlesysteem een signaal aan de lift terug, is de liftdeur gesloten, en de volgende cyclus is ingegaan.
In het gehele proces, kunnen wij het als interactie tussen de AGV auto, het AGV verzendingsbeheersysteem, en de intelligente lift begrijpen. Het omvat de interactie tussen de AGV auto en het AGV verzendingsbeheersysteem door het draadloze netwerk en het AGV verzendingsbeheersysteem en informatie-uitwisseling tussen de liften.
![]()
Hier hoofdzakelijk is met u het het AGV systeem en proces van de liftinteractie delen: AGV schrijft in want de lift van de liftregistratie → registratie is succesvolle AGV → de vloer→ lift van de vragenlift terugkoppelt vloer→ AGV van de de deur→ lift van de verzoekenlift AGV van de de deurgreep → binnengaat/van de uitgangenlift → AGV Einde terugkoppelt die de liftdeur verzenden die van het deur openingsverzoek → → liftversie met succes sluiten.
Met de verbetering van AGV technologie, zullen de toepassingsscenario's van AGV verder uitgebreid worden. In de toekomst, AGV zullen de karretjes aan complexe het werkscenario's zoals veelvoudige hindernissen, dwarsvloeren, en volgestopte pakhuizen kunnen aanpassen, en kunnen de veiligheid, de stabiliteit, de betrouwbaarheid en de orde van het logistiek behandelende proces meer verzekeren.
|
Punt
|
Specificaties
|
|
Model
|
Zl-RT-K1 |
|
Afmetingen
|
L1875*W580*H350
|
|
Gidsmethode
|
Magnetische navigatie
|
|
Het lopen richting
|
Voorwaarts, Jonge os, rug
|
|
Voorwaartse snelheid
|
90m/min
|
|
Laadvermogen
|
600Kg
|
|
Batterij
|
Lithiumbatterij
|
|
Het laden methode
|
Draadloze last
|
|
De manier van elektrovertoning
|
Elektronische vertoning
|
|
Veiligheid het ontdekken afstand
|
3m
|
|
Alarmvorm
|
Muziekalarm en licht alarm
|
|
Machtssysteem
|
BLDC-motor
|
|
Veiligheidssysteem
|
Infrarood hindernisvermijden, mechanisch antibotsingsontwerp, de knoop van het noodsituatieeinde
|
Fabrieksbeeld
![]()
![]()
![]()
Onze producten worden over de hele wereld verkocht. U kunt gerust zijn op het hele proces van onze producten.