
Het rubberloopvlak 2T laadt de Hoge Tractieac Wielen van de het Wiel15km/h Op zwaar werk berekende Robot van de Motoraandrijving
-
Hoog licht
2T AC het Wiel van de Motoraandrijving
,15km/h AC het Wiel van de Motoraandrijving
,15km/h op zwaar werk berekende robotwielen
-
WielloopvlakSoildrubber
-
Wieldiameter400mm
-
Lading2t
-
snelheid15km/h
-
Tractiemacht2000W
-
Leidingsmacht750W
-
Nominaal vermogentorsie143Nm
-
GebruiksscèneOpenlucht
-
Plaats van herkomstGuangzhou, China
-
MerknaamZHLUN
-
ModelnummerZl-490
-
Min. bestelaantalOvereen te komen
-
PrijsNegotiable
-
Verpakking DetailsVerpakking: Houten Doos
-
Levertijd25 dagen
-
BetalingsconditiesL/C, T/T
-
Levering vermogen1000 stukken per maand
Het rubberloopvlak 2T laadt de Hoge Tractieac Wielen van de het Wiel15km/h Op zwaar werk berekende Robot van de Motoraandrijving

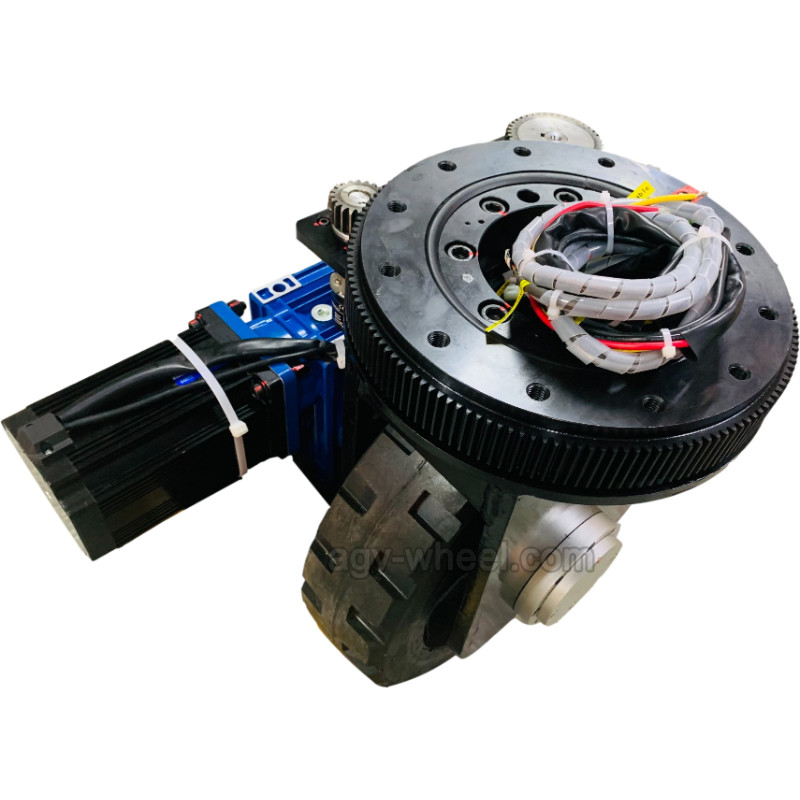
Rubber van de de Wielen2t Lading van de Loopvlak Op zwaar werk berekende Robot Hoge de Tractiemacht
Specificatie
|
Nr
|
Punt
|
Eenheid
|
Gegevens
|
|
1
|
Installatiehoogte
|
mm
|
490
|
|
2
|
Lading
|
Kg
|
2000
|
|
3
|
Motortype
|
/
|
BLDC/Servo
|
|
4
|
Tractiemotor
|
KW
|
2
|
|
5
|
Snelheidsverhouding
|
/
|
1:15
|
|
6
|
Leidingsmotor
|
KW
|
0,75
|
|
7
|
Snelheid
|
km/h
|
15
|
|
8
|
Wieldiameter
|
mm
|
400
|
|
9
|
Wielbreedte
|
mm
|
100
|
|
10
|
Sensor
|
/
|
Facultatief
|
|
11
|
Max.Torque
|
NM
|
143
|
|
Sommige parameters kunnen worden aangepast
|
|||
Eigenschappen
De anti-vibration structuur van wielen en het hoog-torsiestuurmechanisme van wielen met verminderde rollende lagers worden streng ontworpen om aan de functionele vereisten te voldoen.
Gebaseerd op de specifieke van het wiellay-out en voertuig dynamica, worden het rotatie kinematische model evenals de rechte en rotatie dynamische modellen van AGV gevestigd.
Om de motiekenmerken van wielen onder zware lading in drie motiestaten met inbegrip van rechte motie, zelf-omwenteling en omwenteling rond een bepaald punt goed te verifiëren, zijn de simulaties in ADAMS en de fabrieksexperimenten allen geleid.
De simulatieresultaten wijzen erop dat de normale en wrijvingkrachten van wielen behalve sommige kleine schommelingen zeer stabiel zijn, die door de distributie van de niet-centrumlading op AGV worden veroorzaakt.
De experimentele resultaten bij het drijven van snelheid van AGV hebben direct aangetoond dat zijn het plaatsen nauwkeurigheid genoeg voor gebruik in echte vliegtuigenlopende band is.
Een nieuw openluchtlay-outplan van wielen voor op zwaar werk berekende AGV wordt in alle richtingen voorgesteld, die de werkende en bewegende capaciteit van AGV verbetert. Een functie van mens-machine samenwerking wordt ook aangeboden door AGV voor het vervoeren van grote werkstukken intelligent en economisch in ruimte en andere zware industrieën.
![]()
![]()
![]()
Onze producten worden over de hele wereld verkocht. U kunt gerust zijn op het hele proces van onze producten.